
Frissítve: 2018.11.01.
Az előző bejegyzésből megismerhettük, hogy mik okozzák leggyakrabban az elektromos szervó meghibásodását. Most azt nézzük meg, hogyan lehet elvégezni a kormányrásegítés beállítását, kalibrálását.
Az elektromos szervó kalibrálása előtt a futóművet be kell állíttatni, a hibás, szakadt szilenteket ki kell cseréltetni. A rosszul beállított futómű, szakadt lengőkar szilentek, stb. miatt az elektromos szervó felesleges terhelésnek van kitéve, ahogy a kormánymű és futómű alkatrészek is. Mindez hozzájárul az érintett alkatrészek idő előtti elhasználódásához is!
A kalibráláshoz szükségünk lesz egy laptopra, regisztrált Multiecuscan-re és egy jól működő USB-s ELM327 diagnosztikai kábelre. (Lásd diagnosztika alapismeretek.)
A művelet maga egyszerű, csak a fent leírtakra kell odafigyelni. Az alábbi videóban láthatjátok a folyamatot.
A futómű beállítása után egy sík terepen parkoljunk le úgy, hogy az első kerekek egyenesen állnak. Célszerű gurulni pár métert megálláskor, hogy meggyőződjünk arról, hogy az autó egyenesen halad.
Vagy ha erre lehetőségünk van, akkor a futómű beállításakor a kerekeket egyenesbe állítva végezzük el a kalibrálást.
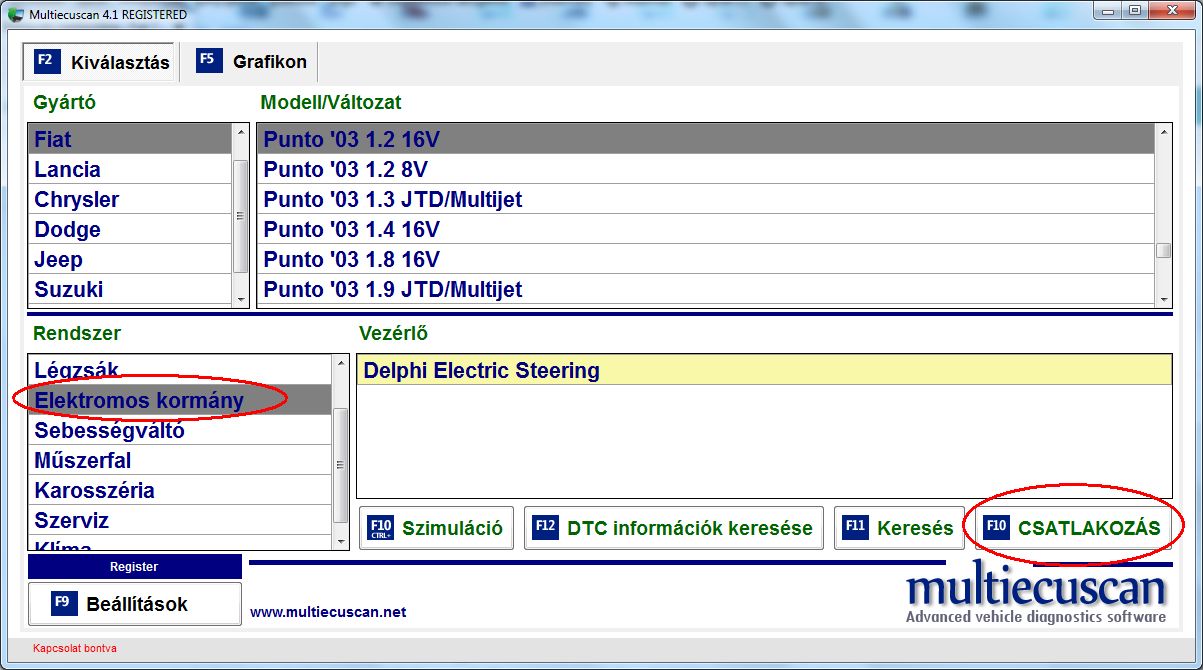
Az ELM327, vagy az elektromos kormány vezérlőjéhez alkalmas, MES-kompatibilis diagnosztikai kábel csatlakoztatását követően adjuk rá a gyújtást és indítsuk be a motort, majd csatlakozzunk az Elektromos kormány-vezérlőhöz.
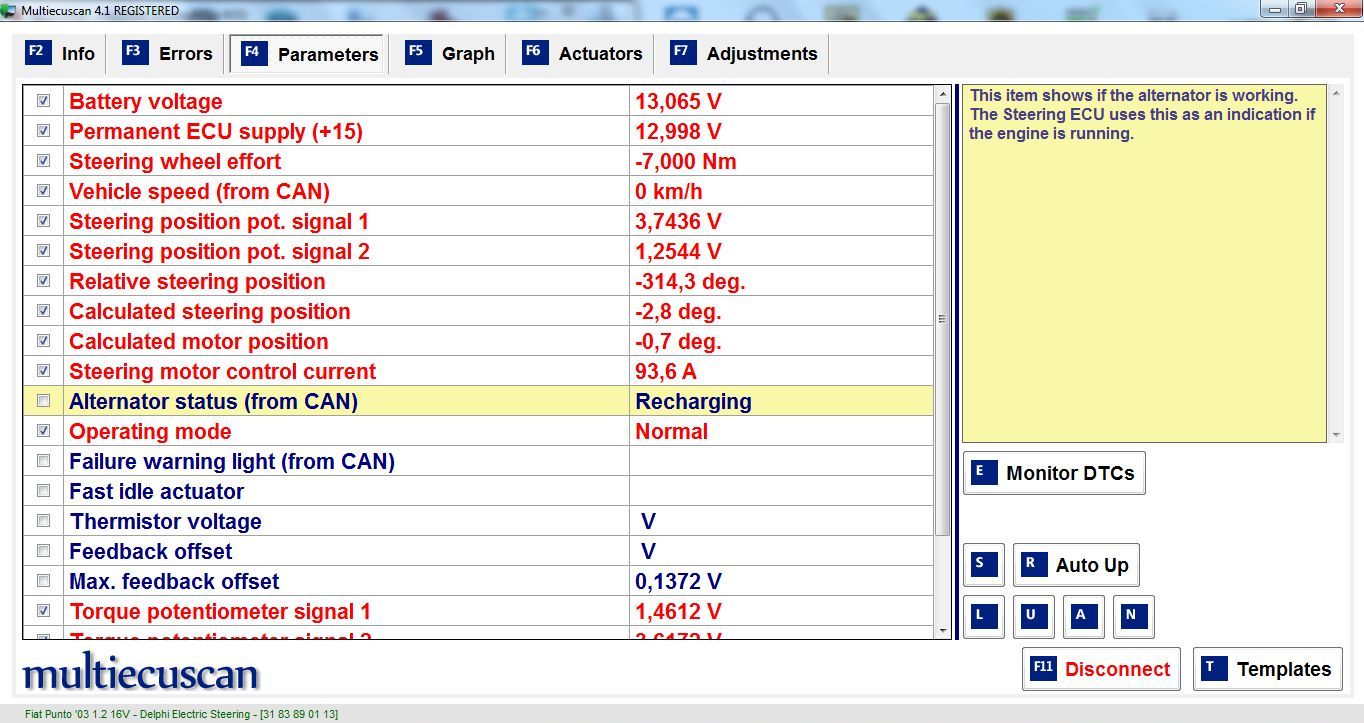
Váltsunk a Paraméterekre, itt az alábbi paramétereket, “élő adatokat” tudjuk kiolvasni. Vastaggal jelöltem, amiket érdemes kiválasztani a kalibrációhoz.
– Akkumulátor feszültség: a vezérlő csatlakozóin mért feszültség, ha lényegesen kevesebbet mutat, mint az akkumulátor-sarukon mérhető feszültség, akkor nézzük át az idáig vezető csatlakozókat, érintkezőket.
– Gyújtáskapcsoló utáni áramellátás: Ugyanaz vonatkozik rá, mint az előzőre.
– Kormányzási erő: Ekkora nyomatékot fejt ki a szervomotor a kormányoszlopra.
– Jármű sebessége: CAN buszról kapott jel, abban van szerepe, hogy mekkora erőt fejtsen ki a szervó.
– 1. és 2. kormányhelyzet potméter: Feszültségben kifejezett értékek
– Relatív kormánykerék állás: Fontos paraméter, egyike azoknak, ami alapján a vezérlő meghatározza, hogy mekkora erőt fejtsen ki a szervó, hogy megfelelő legyen a rásegítés.
– Számított kormánykerék és motor állás
– Szervokormány motor vezérlőáram: Az elektromos szervomotor számított áramfelvétele.
– Generátor állapota: CAN buszról kapott információ arról, hogy működik, vagy sem.
– Működési mód: Normál vagy City üzemmód.
– Figyelmeztető lámpa: CAN buszról kapott információ a műszerfalon lévő figyelmeztető lámpáról.
– Emelet alapjárat kérés: Ha magas áramfelvétel szükséges, a vezérlő magasabb alapjáratot kér a motortól, ennek állapotát jeleníthetjük meg.
– Termisztor feszültség: Hőmérséklet érzékelő értéke.
– Visszacsatolás és maximális visszacsatolás
– Nyomatékérzékelő feszültség 1 és 2: A nyomatékérzékelő(k) értékei feszültségben.
– Nyomaték jel különbség
– 1. és 2. kalibráció nyomaték jel különbség
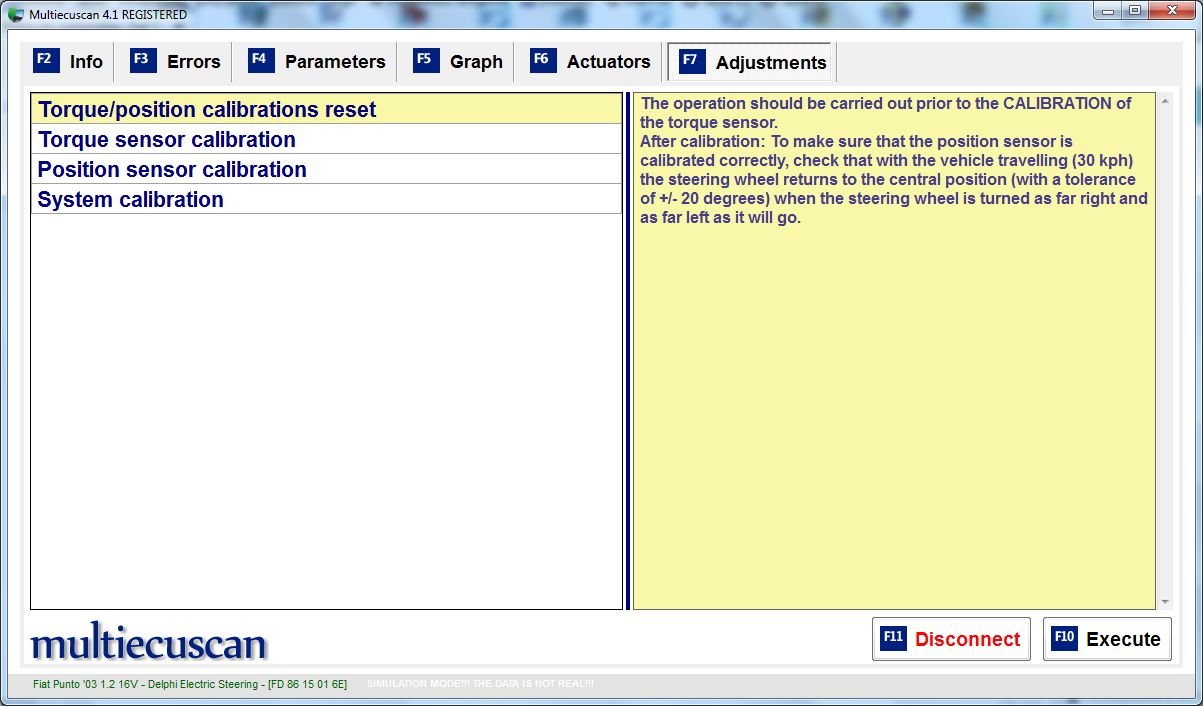
Az Adjustments/Korrekció fülre váltva elénk tárulnak a kalibráció menüpontjai.
– Nyomaték/pozíció érzékelő alaphelyzetbe állítása: Ezt kell végrehajtanunk kalibráció előtt.
– Nyomatékérzékelő kalibráció: A vezérlő ezzel állítja be a nyomatékérzékelést, ehhez azt feltételezi, hogy a kormány középállásban (null-pozícióban) van.
– Pozícióérzékelő kalibráció: Az első kerekeknek egyenesen kell állniuk, hogy helyes legyen a beállítás.
– Rendszer kalibráció: Elméletileg ugyanaz, mint a fentiek elvégzése, de gyakran nem működik. Biztosabb, ha egyenként hajtjuk végre a fenti korrekciókat.
A kalibrálás után ellenőrizni kell, hogy álló autónál (de járó motorral!) azonos erő kell-e a kormány jobbra és balra tekeréséhez. Nagyjából meg kell egyeznie a balra és jobbra tejesen kitekert kormány-elfordulás értékeknek is. Ha 20°-on belül van a két végállás eltérése, az még elfogadható.
A kalibrálást próbaúttal ellenőrizzük. Kb. 30 km/h sebességgel haladva, teljesen jobbra és balra kitekert helyzetből a kormánynak +/- 20 fok tűréssel vissza kell térnie középső helyzetbe. Szükség esetén kalibráljuk újra.